EasyFeeder Steuerung
Die EasyFeeder Steuerung belegt 32 Byte an Daten am Feldbus und bildet alle relevanten Parameter für die Ansteuerung des Feeder ab.
Nähere Informationen finden Sie in unserem EasyFeeder Feldbus Bereich!
Das Eingangsmodul beinhaltet alle Funktionen zum Steuern der Feeder-Station und setzen der Parameter.
Hinweis: Diese Funktion ist lizenzpflichtig. Eine separate TCP/IP Kommunikation kann dadurch entfallen.
| Signal | Byte / Bit | Datentyp | Flanke | Beschreibung |
|---|---|---|---|---|
| Get Part | 0.0 | Bit | Positiv | Fordert 'Anzahl Teile / Pick' an, sind keine Teile verfügbar, wird die entsprechende Smart Sequenz gestartet |
| Aktiv (Online/Offline) | 0.1 | Bit | Positiv / Negativ | Eine positive Flanke dieses Signals schaltet die Station Online, eine negative Flanke schaltet die Station Offline. |
| Programmwechsel | 0.2 | Bit | Positiv | Eine positive Flanke dieses Signals löst einen Programmwechsel aus, wodurch das Programm mit der anstehenden Programmnummer aus Byte 2 & 3 dieses Moduls geladen wird. |
| Prepare Part | 0.3 | Bit | Positiv | Bereitet die 'Anzahl Teile / Pick' vor, damit diese mit 'Get Part' abgeholt werden können. |
| Automatischer Programmwechsel | 0.4 | Bit | - | Wenn dieses Bit auf logisch 1 gesetzt wird, dann wird bei jeder Änderung der Programmnummer das Programm automatisch gewechselt. |
| Sicherung starten | 0.5 | Bit | Positiv | Startet die Erstellung eines lokalen Backups |
| Smart Sequenz abbrechen | 0.6 | Bit | Positiv | Bricht die aktuelle Smart Sequenz ab |
| System herunterfahren | 0.7 | Bit | Positiv | Löst das Herunterfahren des Controllers per steigender Flanke aus. (Verfügbar ab EasySightPro® 10.1.2) |
| Force new image | 1.0 | Bit | Positiv | Erzwingt eine neue Bildaufnahme und aktualisiert die Liste aller Koordinaten, damit soll sichergestellt werden, dass alle Koordinaten für die Entnahme gültig sind. |
| Smart Purge Full | 1.1 | Bit | Positiv | Startet die komplette Entleerung von Bunker und Plattform. Diese Funktion wird verwenden, um das System bei Produktionsende zu entleeren. |
| Smart Purge Plate | 1.2 | Bit | Positiv | Startet die Entleerung der Plattform. Diese Funktion wird verwendet, um nicht greifbare Teile (Bruch, Schmutz) zu entfernen |
| Bildbereich blockiert | 1.3 | Bit | - | 0: Kamera Sichtfeld ist frei und Bilder können aufgenommen werden 1: Kamera Sichtfeld ist blockiert. Die Bildaufnahme wird unterdrückt. |
| Roboter Kalibrierung starten | 1.4 | Bit | Positiv | Führt die Roboter- / Kamerakalibrierung für die angewählte Position aus. |
| Roboter Kalibrierung testen | 1.5 | Bit | Positiv | Testet die aktuelle Roboterkalibrierung. |
| Roboter PickPoint automatisch setzen | 1.6 | Bit | Positiv | Berechnet den Aufgreifpunkt des Roboters automatisch. |
| Programmnummer | 2-3 | Ganzzahl | - | Programmnummer des Programms, welches bei positiver Flanke des Signals Programmwechsel geladen wird. |
| Parameter | ||||
|
Hinweis: Alle Parameter werden nur bei Änderung mit der EasyFeeder-Station abgeglichen |
||||
| Anzahl Teile / Pick (part_quantity) | 4-5 | Ganzzahl | - | Definiert die Anzahl an Teilen, die von 'Get Part' und 'Prepare Part' für eine erfolgreiche Ausführung erkannt werden müssen. Parameter: part_quantity |
| Erkennungszeit (s) (timeout) | 6-7 | Ganzzahl | - | Dieses Timeout (in Sekunden) wird bei der Ausführung der Smart Sequenzen (wie get_part) verwendet. Wird das Timeout überschritten, dann wird der Befehl abgebrochen und eine Timeout-Meldung gesendet. Parameter: timeout |
| Neues Bild (image_after send) | 8 | Byte | - | Erzwingt die Aufnahme eines Bildes, nachdem ein Teil entnommen wurde. Jedes Mal, wenn 'Get Part' oder 'Prepare Part', nimmt das System unmittelbar vorher automatisch ein Bild auf. Parameter: image_after_send |
| Roboter Kalibrierung | ||||
| Position | 9 | Byte | - | Aktueller Position für 'Roboter Kalibrierung starten'. |
| Roboter X | 10-13 | Gleitkomma | - | Aktuelle Koordinate X |
| Roboter Y | 14-17 | Gleitkomma | - | Aktuelle Koordinate Y |
| Roboter Winkel | 18-22 | Gleitkomma | - | Aktuelle Ablage-Winkel für 'Roboter Pickpoint automatisch setzen' |
Beschreibung Signale
Fordert ein oder mehrere Teile an. Die Anzahl der zurückgegebenen Teile kann mit dem Parameter part_quantity geändert werden. Dieser Parameter ist standardmäßig auf 1 gesetzt.
Smart Sequenz
Hinweis: Blockiert alle anderen Smart Sequenzen bis zum Beenden der Sequenz.
Parameter
-
Anzahl Teile / Pick (part_quantity)
-
Erkennungszeit (timeout)
-
Neues Bild (image_after_send)
Ausführung
-
Bis die Erkennungszeit erreicht oder Anzahl an Teilen gefunden wurde
Ausgabe
-
Teile auf Plattform
-
Greifbare Teile
-
Anzahl Positionen
-
Position 1 bis 5 je nach Parameter
-
Signal Positionen gültig (Toggle)
-
Signal Teile bereit
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird gesetzt
-
Signale Smart Sequence IO, Smart Sequence NIO und Smart Sequence Code
Bereitet die Teile für GetPart vor, damit diese beim Abholen rechtzeitig bereit stehen. Die Anzahl der zurückgegebenen Teile kann mit dem Parameter part_quantity geändert werden. Dieser Parameter ist standardmäßig auf 1 gesetzt.
Smart Sequenz
Hinweis: Blockiert keine Smart Sequenz und wird automatisch durch alle anderen Smart Sequenzen beendet.
Parameter
-
Anzahl Teile / Pick (part_quantity)
-
Neues Bild (image_after_send)
Ausführung
-
Endlos bis Anzahl an Teilen gefunden oder Sequenz abgebrochen wurde
Ausgabe
-
Teile auf Plattform
-
Greifbare Teile
-
Position 1 bis 5 je nach Parameter
-
Signal Teile bereit
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird nicht gesetzt, nicht blockierend ausgeführt wird Timing
Löscht den aktuellen Teile Buffer ab und führt ein neues Get Part aus.
Damit soll sichergestellt sein, dass der Teile Buffer aktuell ist und alle Positionen gültig sind. Dies ist sinnvoll, wenn sich die Teile durch externen Einfluß (Roboter, Greifer, Maschine) eventuell bewegt haben.
Hinweis: Die Funktion ist ident mit dem Parameter 'Neues Bild' (image_after_send) und dem Aufruf von Get Part.
Entleert Bunker und Plattform mit Kameraunterstützung. Diese Funktion wird bei Produktionsende verwendet, um das System komplett zu entleeren.
Smart Sequenz
Hinweis: Blockiert alle anderen Smart Sequenzen bis zum Beenden der Sequenz.
Parameter
-
Erkennungszeit (timeout)
Ausführung
-
Bis Erkennungszeit erreicht oder keine Teile mehr erkannt werden
Ausgabe
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird gesetzt
-
Signale Smart Sequence IO, Smart Sequence NIO und Smart Sequence Code
Entleert nur die Plattform mit Kameraunterstützung. Diese Funktion wird verwendet, um nicht greifbare Teile (Bruch, Verschmutzungen, Fremdteile) zu entfernen.
Smart Sequenz
Hinweis: Blockiert alle anderen Smart Sequenzen bis zum Beenden der Sequenz.
Parameter
-
Erkennungszeit (timeout)
Ausführung
-
Bis Erkennungszeit erreicht oder keine Teile mehr erkannt werden
Ausgabe
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird gesetzt
-
Signale Smart Sequence IO, Smart Sequence NIO und Smart Sequence Code
Nimmt ein neues Bild auf und sucht nach dem Kalibrierteil. Wird das Kalibrierteil gefunden, dann wird für die angewählte Position ein Punkte-Paar von Roboter- und Kamerakoordinaten abgespeichert.
Smart Sequenz
Hinweis: Blockiert alle anderen Smart Sequenzen bis zum Beenden der Sequenz.
Parameter
-
Erkennungszeit (timeout)
-
Roboter Position, X, Y (Der Winkel wird für die Kalibrierung nicht verwendet)
Ausführung
-
Bis das erste Bild ausgewertet, oder die Erkennungszeit erreicht wurde
Ausgabe
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird gesetzt
-
Signale Smart Sequence IO, Smart Sequence NIO und Smart Sequence Code
-
Signale Roboter Rms und Roboter Kalibrierung gültig
Nimmt ein neues Bild auf, sucht nach dem Kalibrierteil und gibt die dadurch erkannte Position aus. Hiermit kann überprüft werden, ob die Roboter-Koordinaten im Feeders mit den tatsächlichen Koordinaten übereinstimmen.
Smart Sequenz
Hinweis: Blockiert alle anderen Smart Sequenzen bis zum Beenden der Sequenz.
Parameter
-
Erkennungszeit (timeout)
Ausführung
-
Bis das erste Bild ausgewertet oder die Erkennungszeit erreicht wurde
Ausgabe
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird gesetzt
-
Signale Smart Sequence IO, Smart Sequence NIO und Smart Sequence Code
-
Signale Position 1 bis 5 (X / Y / Winkel / ID), Anzahl Positionen und Positionen gültig (Toogle)
Berechnet den Aufgreifpunkt (PickPoint) des Roboters automatisch. Der Roboter legt dazu ein Bauteil auf einer definierten Position ab und übermittelt die Ablage-Koordinaten. Mittels eines neuen Bilds und den übermittelten Koordinaten, wird der neue PickPoint berechnet.
Smart Sequenz
Hinweis: Blockiert alle anderen Smart Sequenzen bis zum Beenden der Sequenz.
Parameter
-
Erkennungszeit (timeout)
Ausführung
-
Bis das erste Bild ausgewertet oder die Erkennungszeit erreicht wurde
Ausgabe
-
Signal Smart Sequence Running wird gesetzt
-
Signal Smart Sequence done (Toogle) wird gesetzt
-
Signale Smart Sequence IO, Smart Sequence NIO und Smart Sequence Code
Im Kommunikationsexplorer sieht das Eigenschaftsfenster der Stationssteuerung wie folgt aus:
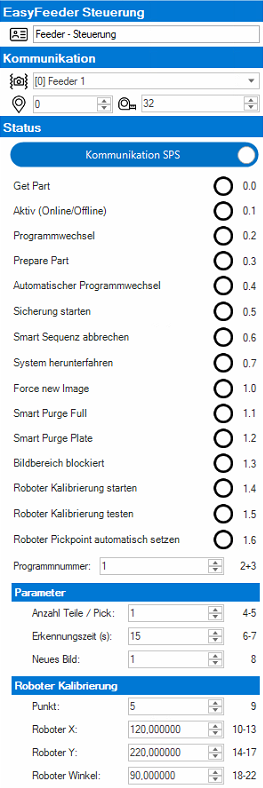
Im Feld "EasyFeeder Steuerung" kann ein Name des Bausteins vergeben werden.
Unter "Kommunikation" legt man fest, welcher Station diese Bautein zugeordnet wird und man kann das Startbyte im Datenbereich der Schnittstelle festlegen.
Im Feld "Status" ist der aktuelle Status der Signale ersichtlich beziehungsweise kann man hier den Signalfluss von der externen Steuerung überbrücken und die einzelnen Signale selbst steuern.